ロンドン大学で MSc Computer Science: Computer systems モジュールを履修中。
講義内容に関して記録した個人的なスタディノートです。
全 12 週のうち 6〜12 週目の内容を記録します。(6 週目開始:2025 年 2 月 10 日 / 12 週目終了:2025 年 3 月 31 日)
Week 6: Processes and threads #
概要
This week introduces you to operating systems, which are software packages that coordinate a computer’s internal activities as well as oversee its communication with the outside world. It is a computer’s operating system that transforms the computer hardware into a useful tool. The goal is to understand what operating systems do and how they do it.
キーコンセプト
This topic includes:
- components of an operating system
- the concept of a process
- handling competition between processes
- attacks from outside and within
- implementation
- scheduling
- inter-process communication
- synchronisation.
レクチャーリスト
- Process Description and Control
- Lecture 1: Introduction to processes and threads
- Lecture 2: What is a process?
- Lecture 3: Process states
- Lecture 4: Process description
- Lecture 5: Process control
- Lecture 6: Execution of the operating system
- Threads
- Lecture 7: Processes and threads
- Lecture 8: Types of threads
- Lecture 9: Multicore and multithreading
- Scheduling
- Lecture 10: Types of processor scheduling
- Lecture 11: Scheduling algorithms
Lecture 1: Introduction to processes and threads #
今週の講義で学習することの全体像の説明。
Lecture 2: What is a process? #
Processes and Threads
- The operating system manages the execution of applications by allocating necessary resources and switching between them using the processor.
- This allows multiple applications to appear to run simultaneously.
What is a Process
- A process includes a portion of program code and related data being executed by the processor.
- Processes make up the basic unit of execution in most operating systems.
Process Control Block (PCB)
- Each process is tracked using a data structure called a process control block.
- The PCB stores key attributes, including:
- Unique process identifier
- Current state (e.g., running, waiting)
- Priority level for scheduling
- Program counter (address of the next instruction)
- Memory pointers for code and data
- Context data (register values)
- I/O information (e.g., device requests, file usage)
- Accounting data (start time, total execution time)
Managing Processes
- The PCB allows a process to be paused, resumed, or terminated.
- When a process is interrupted, its context (program counter and registers) is saved.
- Another process’s context is then loaded to allow it to run.
- This mechanism supports multi-processing by allowing multiple processes to share the CPU over time.
Lecture 3: Process states #
Process States
- The dispatcher is responsible for switching between processes in memory and sending them to the CPU.
- Each process has its program counter and context data saved when switched out and restored when resumed.
Process Execution and Memory Layout
- Processes occupy varying sizes of memory depending on their instructions.
- Dispatcher uses the program counter to track the current instruction and manages transitions between processes.
Process State Models
- There are two common models for describing process states: the two-state model and the five-state model.
- These are alternative ways to represent the lifecycle of a process.
Two-State Model
- A simplified model where a process is either running or not running.
- Not running includes any process that is waiting for CPU time or blocked.
- Easy to implement but lacks detail and efficiency for complex scheduling.
Five-State Model
- A more detailed and practical model used in modern operating systems.
- Includes the following states:
- New: the process is being created.
- Ready: the process is waiting for CPU time.
- Running: the process is currently being executed.
- Blocked: the process is waiting for an event (e.g., I/O completion).
- Exit: the process has finished or terminated.
This model provides better scheduling and process management by distinguishing between ready and blocked processes.
Lecture 4: Process description #
Process Description
- The operating system is responsible for scheduling processes, allocating resources, and handling I/O requests.
- To manage processes, the OS uses various control structures that store and track important process information.
Types of Control Structures
- Memory tables: Track memory allocation for each process, including main and virtual memory.
- I/O tables: Track the status and usage of input/output devices by processes.
- File tables: Store file status, location, and whether a file is being read or written.
- Process tables: Contain information about each process such as location, state, and resources.
Process Image
- A process is stored as a process image, which includes:
- Program code
- Process data
- Process control block (PCB)
- Stack (used for function parameters and system call data)
Process Control Block (PCB)
- One of the most important structures used to manage processes.
- Contains:
- Unique process identifier
- Current state
- Program counter
- Register data
- I/O and file information
- Execution control and interrupt data
Execution and Memory Management
- Part of the process image is loaded into main memory; the rest remains in virtual memory until needed.
- The OS uses the PCB to switch processes in and out of the CPU, ensuring proper execution order.
Key Points
- Control structures allow the OS to locate, manage, and schedule processes efficiently.
- The PCB and related tables enable the OS to track the current state and resource usage of each process.
Lecture 5: Process control #
Process Control
- Modern operating systems manage processes using two modes: privileged mode (kernel mode) and user mode.
- Privileged mode allows execution of sensitive instructions like memory management and I/O control.
- User mode restricts access and is used for running user-level applications.
Operating System Responsibilities
- The OS is responsible for process management, memory management, I/O device management, and support functions.
Process Creation
- Each new process receives a unique identifier.
- The process is added to the process table.
- Memory is allocated for the process image and its process control block (PCB).
- The PCB is initialized with default values, including the process state (e.g., ready or ready suspend).
- Resources such as files or input devices may be allocated upon request or inherited from a parent process.
Scheduling and Switching
- The OS uses scheduling queues (often linked lists) to manage process states.
- A process switch occurs when the OS regains control, possibly due to:
- End of time slice
- Interrupt
- I/O request or completion
- Memory fault (data not found in main memory)
Memory Management
- The OS maintains memory allocation for both main and virtual memory.
- It manages movement of memory blocks (pages and segments) between main memory and secondary storage.
I/O Device Management
- The OS manages multiple I/O devices.
- Tasks include buffer handling and resource allocation to processes requesting access.
- Devices can interrupt each other depending on usage demands.
Support Functions
- Small utility routines used by the OS for:
- Handling interrupts
- Updating system tables
- Monitoring system performance
- Assisting components like the dispatcher
Lecture 6: Execution of the operating system #
Execution of the Operating System
- The operating system is not a single monolithic entity but a collection of modular programs responsible for specific tasks.
- The processor determines when control is passed to the operating system.
Types of Operating System Execution Models
- There are three main models:
- Non-process kernel
- Execution within user processes
- Process-oriented (process-based) operating systems
Non-Process Kernel
- The OS operates separately from user programs.
- Only user applications are treated as processes.
- OS runs in privileged mode with its own memory region and system stack.
- The kernel restores process context when switching back to user mode.
Execution Within User Processes
- The OS is executed within the address space of user processes.
- Each process image includes:
- Program and data region
- User stack
- Process control block
- Special kernel stack for system functions
- OS routines are executed by the user through interaction.
- Code sharing allows OS routines to be present in multiple user processes.
Process-Oriented Operating Systems
- Kernel functions are implemented as separate processes.
- Enables modular design, easier development, and debugging.
- Well-suited for multi-core or multiprocessing systems.
- Promotes performance improvement through parallel execution.
Lecture 7: Processes and threads #
Processes and Threads
- A process provides the resources for executing program code and includes elements such as code, open handles, unique ID, priority class, and more.
- A thread is a schedulable unit within a process. Every process starts with a primary thread and can create additional threads.
Thread Characteristics
- Threads within the same process share:
- Virtual address space
- System resources
- Exception handlers
- Each thread has its own:
- Thread ID
- Scheduling priority
- Context (registers, stack)
- Thread control block
Thread Creation and Scheduling
- Threads are placed in a ready queue when created.
- On multiprocessor systems, multiple threads can execute simultaneously.
- Single-threading involves one execution path per process.
- Multithreading enables multiple concurrent execution paths within one process.
Advantages of Threads over Processes
- Faster to create and terminate than processes.
- Lower overhead when switching between threads within the same process.
- Threads communicate more efficiently than processes because they share memory and resources.
Thread Model Structure
- Single-threaded model: One thread with shared stack and control structures.
- Multi-threaded model: Shared address space with separate stacks and thread control blocks per thread.
Thread Pool
- A thread pool is a collection of worker threads used to handle tasks asynchronously.
- Reduces the need to frequently create/destroy threads.
- Thread states must be tracked within the pool.
Thread States
- Core states include:
- Running: currently executing
- Ready: waiting to be scheduled
- Blocked: waiting for an event (e.g., I/O)
- Unblocked: event complete, moved to ready
- Finished: task complete, resources deallocated
Synchronization and Resource Sharing
- Threads share address space and resources, so changes by one thread affect others.
- Synchronization is required to prevent data conflicts or deadlocks.
- Improper synchronization may lead to blocked threads or race conditions.
Lecture 8: Types of threads #
Types of Threads
- There are two main types of threads:
- User-level threads (ULT)
- Kernel-level threads (KLT)
User-Level Threads (ULT)
- Managed entirely in user space by the application.
- The kernel has no awareness or involvement in thread management.
- Threads are created and managed using thread libraries and utilities.
- Thread switching does not require kernel involvement, reducing overhead.
- Scheduling can be customized by the application (e.g., round-robin or priority-based).
- No kernel updates are required to support ULT.
Advantages of ULT
- Fast context switching since it avoids kernel mode.
- Greater flexibility in scheduling policies.
- No need for system-level support from the kernel.
Disadvantages of ULT
- A system call from one thread blocks all threads in the same process.
- ULTs cannot take full advantage of multiprocessing because the OS sees only one process.
Kernel-Level Threads (KLT)
- Managed by the operating system or kernel.
- Each thread is known and scheduled independently by the kernel.
- Allows true concurrency; multiple threads can run in parallel on multiple processors.
- If one thread is blocked, others in the same process can continue executing.
- Examples include Microsoft Windows.
Advantages of KLT
- Full support for parallel execution on multiprocessor systems.
- Better responsiveness when threads are blocked.
Disadvantages of KLT
- Thread switching requires a mode switch to the kernel, adding overhead.
- Slower than ULT in terms of creation and context switching.
Combined Approach
- Uses both user-level and kernel-level threads.
- User threads are mapped to kernel threads.
- A blocked user thread does not block the entire process.
- Provides the benefits of both models.
- Example: Solaris operating system.
Lecture 9: Multicore and multithreading #
Multicore and Multithreading Systems
- Multicore systems can enhance performance for applications with many threads, but require careful design to avoid performance issues.
- Concurrent processing handles one thread at a time but switches quickly between them.
- Multiprocessing allows true parallel execution of multiple threads or processes simultaneously.
Thread-Based Approaches in Applications
- Multiprocess applications (e.g., Oracle) use multiple single-threaded processes.
- Java applications support multithreading at the core via the Java Virtual Machine.
- Multi-instance applications (e.g., video editors) can run multiple instances in parallel on multicore systems.
- Multithreading allows multiple instruction streams to run in parallel within a single process, reducing overhead.
Multithreading Characteristics
- Threads in the same process share address space and resources, enabling efficient communication.
- Threads in different processes can use shared memory for communication.
- Thread switching is faster than process switching, but requires synchronization to avoid race conditions and deadlocks.
Windows and Multicore Multithreading
- Windows processes are treated as objects, each with one or more threads.
- Processes and threads in Windows have built-in synchronization capabilities.
- Each process has a security access token, identifying the user and controlling access rights.
- Threads in different processes can run concurrently; threads in the same process can run in parallel on multicore systems.
- Windows uses object-oriented design to manage process creation and execution.
- When a new process is created, it uses a template to define its structure and interface.
- Each process has at least one thread, which can spawn additional threads.
Developer Considerations
- OS handles many aspects of multithreading and multiprocessing, but developers must design applications carefully.
- Efficient use of multicore systems depends on how threads and processes are managed within the application.
Lecture 10: Types of processor scheduling #
Processor Scheduling Overview
- Processor scheduling assigns time slots to processes to maximize efficiency and throughput.
- In a multiprogramming environment, processes alternate between CPU execution and waiting for I/O.
- Scheduling determines which process runs next and manages limited CPU resources effectively.
Types of Scheduling
- Scheduling is categorized by time scale:
- Short-term scheduling
- Medium-term scheduling
- Long-term scheduling
- Input/Output (I/O) scheduling
Short-Term Scheduling
- Manages which process gets the CPU next.
- Activated on events like:
- Process blocking
- Interrupts
- System calls
- Runs frequently and directly affects CPU responsiveness.
Medium-Term Scheduling
- Manages which processes stay in main memory and which are swapped out.
- Helps control the degree of multiprogramming.
- Decides whether to suspend or resume processes from memory.
Long-Term Scheduling
- Determines which programs are admitted as processes into the system.
- Controls the rate at which new processes are created.
- Regulates the overall level of multiprogramming.
I/O Scheduling
- Determines the order in which I/O requests are handled.
- Balances access to I/O devices between competing processes.
Lecture 11: Scheduling algorithms #
Overview of Scheduling Algorithms
- Scheduling algorithms determine how CPU time is allocated to processes.
- Two main types:
- Preemptive: allows interruption of a running process.
- Non-preemptive: process runs until completion or waiting state.
Short-Term Scheduling
- Selects which process from the ready queue will run next.
- Operates frequently and directly affects system performance.
Priority Scheduling
- Each process is assigned a priority.
- Higher priority processes are scheduled first.
- Can be preemptive or non-preemptive.
- Risk of starvation for low-priority processes; aging can prevent this.
- Tie-breaking can be done using first-come-first-served.
Common Scheduling Algorithms
- First-Come-First-Served (FCFS)
- Non-preemptive.
- Simple queue based on arrival order.
- Can result in long average waiting times.
- Round Robin
- Preemptive.
- Each process is assigned a fixed time slice (quantum).
- Uses clock interrupts for switching.
- Fair and starvation-free, but high overhead if quantum is too short.
- Shortest Process Next (SPN)
- Non-preemptive.
- Selects the process with the shortest total execution time.
- Efficient but may cause starvation of longer processes.
- Shortest Remaining Time (SRT)
- Preemptive version of SPN.
- Chooses process with the shortest time left.
- Can interrupt current process for a shorter one.
- Highest Response Ratio Next (HRRN)
- Non-preemptive.
- Prioritizes based on a response ratio: (waiting time + service time) / service time.
- Balances short and long processes to avoid starvation.
- Feedback Scheduling
- Preemptive.
- Used when execution time is unknown.
- Uses multiple queues with descending priorities.
- Processes move down queues as they consume CPU time.
Fair-Share Scheduling
- Used in multi-user systems.
- Allocates CPU time based on user-level shares, not just processes.
- Prevents users from monopolizing resources.
- Priority weights can be adjusted per user (e.g., developers vs. managers).
Week 7: Input-output systems and file systems #
概要
In addition to the processor and a set of memory modules, the third key element of a computer system is a set of I/O modules. Each module interfaces to the system bus or central switch and controls one or more peripheral devices. The I/O module contains logic for performing a communication function between the peripheral and the computer bus.
キーコンセプト
This topic includes:
- disks
- files
- caching
- directories
- redundancy
- bus architecture
- interrupt mechanism
- OMA
- device drivers
- disk scheduling algorithms.
レクチャーリスト
- Input-output (O/I) systems
- Lecture 1: Introduction to input-output systems and file systems
- Lecture 2: Input-output systems
- Lecture 3: Input-Output models
- The File system
- Lecture 4: Device management
- Lecture 5: Disk management
- Lecture 6: Disk scheduling policies
- Lecture 7: RAID
- Cache Memory
- Lecture 8: Cache memory
- Lecture 9: Cache placement policies
- Lecture 10: Cache replacement policies
Lecture 1: Introduction to input-output systems and file systems #
今週の講義で学習することの全体像の説明。
Lecture 2: Input-output systems #
- Input-Output Modules are essential components of computer systems, in addition to the processor and memory.
- I/O devices (e.g., monitors, keyboards, mice) cannot connect directly to the system bus due to differing operation methods, data standards, formats, and transfer speeds.
- I/O modules handle communication between external devices and the system bus, manage data transfer rates, and can control multiple devices.
- Monitors and keyboards are traditional input-output devices used for user interaction. The keyboard sends input signals, which are converted into bit patterns (ASCII or Unicode) by a transducer, then transmitted to the I/O module.
- Monitors display character strings, including printable and control characters (e.g., tab, return). Printable characters include letters, numbers, punctuation, and special symbols.
- Control characters influence the formatting of displayed or printed data.
- Disk drives serve as both input and output devices for data storage and retrieval. They are managed by I/O modules that also provide status updates and error detection.
- In hard disk drives, magnetic patterns are converted into bit data through a transducer and device buffer. Disk arms move radially across disk surfaces to read/write data.
- Key takeaway: Each external device has unique characteristics (data format, speed), and I/O modules act as intermediaries to facilitate compatibility without needing hardware changes to the main computer.
- This modular approach allows for easy integration of new hardware without altering the core system.
Lecture 3: Input-Output models #
Functions of I/O Modules
- Control and timing
- Communication with the processor
- Communication with external devices
- Data buffering
- Error detection
Control and Timing
- Coordinates data flow between processor, memory, and devices.
- Decodes processor commands (e.g., read/write disk sectors).
- Manages timing to prevent resource conflicts.
Status Reporting and Addressing
- Reports device status (e.g., ready, busy, error).
- Each I/O device has a unique address for identification.
- Enables proper routing of commands and data.
Data Buffering
- Handles different transfer rates between CPU/memory and devices.
- Buffers data before sending/receiving to/from devices.
- Prevents data loss and improves efficiency.
I/O Module Structure
- Connects system bus to multiple external devices.
- Contains data registers, status registers, and control logic.
- Interfaces with processor via control lines and with devices via device-specific logic.
I/O Operation Techniques
- Programmed I/O: CPU directly controls all I/O operations, leading to inefficiency.
- Interrupt-Driven I/O: CPU initiates I/O and continues execution; interrupted when I/O completes.
- Direct Memory Access (DMA):
- Bypasses CPU by allowing direct data transfer between memory and I/O module.
- CPU is involved only at start and end of transfer.
- Frees CPU for other tasks.
Advanced: Direct Cache Access (DCA)
- Used for high-speed networks (e.g., Ethernet, Wi-Fi).
- Allows I/O devices to load data directly into CPU cache.
- Reduces processor cycles and improves performance.
- Especially useful for handling gigabyte-scale data transfers.
Lecture 4: Device management #
Functions of Device Management
- Notifies applications of resource availability changes.
- Allows adaptation to newly available or unavailable devices.
- Ensures reliable communication between OS, applications, and hardware.
Device Drivers
- Software that controls specific hardware devices.
- Acts as a translator between OS/applications and hardware.
- Hardware-dependent and OS-specific.
- Simplifies high-level programming by abstracting hardware details.
- Interfaces with various devices (e.g., printers, scanners, network cards).
- Loadable drivers (e.g., in Windows/Linux) optimize memory usage.
Driver Identifiers and Development
- Devices are identified by vendor ID and device ID.
- Driver development requires deep knowledge of hardware/OS.
- Logical device drivers are typically written by OS vendors.
- Physical drivers are often developed by hardware manufacturers.
Driver Frameworks
- User Mode Driver Framework:
- Used for message-based devices.
- Crashes do not affect the system.
- Kernel Mode Driver Framework:
- Used for power management, I/O cancellations, plug-and-play.
- Closer to the hardware; system-critical.
Virtual Device Drivers
- Emulate hardware in virtual environments (e.g., cloud services).
- Intercepts hardware calls and routes them within a virtual machine.
- Operates as function calls between virtual and real hardware interfaces.
I/O Software Layer Organization
- User process initiates I/O request.
- Request passes through multiple abstraction layers:
- General I/O functions (e.g., read, write)
- Device-specific drivers and interrupt handlers
- Hardware-specific I/O operations
Buffering in I/O Operations
- Prevents blocking and improves performance in multi-program environments.
- Locks processes in memory during I/O to avoid being swapped out.
Buffering Techniques
- Single Buffering:
- Uses one buffer between memory and user space.
- Simple and effective for sequential access.
- Double Buffering:
- Uses two alternating buffers.
- Enhances speed and smoothness of I/O.
- Circular Buffering:
- Uses multiple buffers in a cycle.
- Effective for continuous data flow.
I/O Organization and File Systems
- Logical I/O:
- Provides a high-level interface (e.g., open, read, write).
- Abstracts device-specific details.
- Device I/O:
- Converts requests into device-specific commands.
- May use buffering for performance.
- Scheduling and Control:
- Manages I/O scheduling, interrupt handling, and status reporting.
File System Components
- Directory Management:
- Maps file names to identifiers using file descriptors or index tables.
- File System Layer:
- Handles file structure and user operations (e.g., read, write).
- Physical Organization:
- Maps logical file access to physical disk addresses.
- Manages secondary storage allocation.
Lecture 5: Disk management #
Functions of Disk Management
- Manages storage on external memory devices (e.g., hard drives, USBs).
- Organizes data into volumes, partitions, and clusters.
- Provides access through logical structures using controllers and firmware.
- Handles fragmentation, partitioning, and file system formats.
Disk Structure and Access
- Disks are made of platters → tracks → sectors (smallest unit, ~512 bytes).
- Clusters consist of multiple sectors; files are stored in clusters.
- Disk controller translates physical geometry into logical structures.
- OS manages files using logical sector numbers.
- File Allocation Table (FAT) tracks used and free clusters.
Performance Metrics
- Seek Time: Time to move disk head to the correct track.
- Rotational Delay: Time for the sector to rotate under the head.
- Access Time = Seek Time + Rotational Delay.
- Disk Cache: Stores recently accessed sectors for faster I/O.
Fragmentation
- Internal: Wasted space due to allocation rules.
- External: Free space scattered in small blocks.
- Data Fragmentation: Large files broken into scattered chunks.
Disk Partitioning
- Divides disk into logical units (partitions).
- Enables multi-OS setups, separate file systems, or backup regions.
- Primary Partition: Referenced in MBR; one active at a time.
- Extended Partition: Contains multiple logical partitions.
- Trade-offs: Better organization but may reduce usable space and performance.
File Systems
- Manage how files are stored and retrieved on storage devices.
- Btrfs: Snapshotting, mirroring, compression.
- Ext4: Large file and volume support (Linux default).
- F2FS: Flash-friendly for mobile/flash memory.
- JFS: Fast mounting and stable.
- NILFS2: Log-structured, minimizes data loss.
- NTFS: Windows default, supports journaling and access control.
- Journaling:
- Records changes before applying them to enable rollback and fault tolerance.
File Storage Types
- Sequential Files:
- Data stored/accessed in order.
- Contains EOF marker or uses directory info to mark end.
- Indexed Files:
- Key-index pairs map to record locations.
- Index stored as separate file for fast access.
- Hash Files:
- Uses hash function to map keys directly to storage buckets.
- Provides fast access without index overhead.
Lecture 6: Disk scheduling policies #
Functions of Disk Scheduling
- Manages the order of disk I/O operations to optimize access times.
- Reduces average seek time and improves throughput.
- Sits between device I/O layer and hardware in the system stack.
- Maintains I/O request queues for each device in multi-program environments.
Basic Scheduling Policies
- First-In-First-Out (FIFO):
- Processes requests in the order they arrive.
- Fair but may result in poor performance with random access patterns.
- Last-In-First-Out (LIFO):
- Processes the most recent request first.
- Reduces seek time for sequential files.
- Risk of starvation for older requests.
- Priority Scheduling:
- Assigns priority levels to requests.
- Short jobs may preempt longer ones.
- Risk of long delays for low-priority tasks.
- Shortest-Service-Time-First (SSTF):
- Selects request with the shortest seek distance.
- Efficient but can lead to starvation for distant requests.
SCAN and Its Variants
- SCAN:
- Disk head moves in one direction, servicing requests in sequence until the end.
- Then reverses direction.
- Reduces starvation and improves fairness.
- C-SCAN (Circular SCAN):
- Only scans in one direction.
- When reaching the end, returns to start without servicing requests.
- Provides uniform wait time.
- N-step-SCAN:
- Divides request queue into fixed-size segments.
- Each segment is scanned one at a time.
- Prevents a single process from monopolizing the disk.
- FSCAN:
- Uses two queues.
- One is processed while new requests are added to the other.
- Ensures fairness and prevents new requests from blocking ongoing scans.
Lecture 7: RAID #
Functions of RAID
- Combines multiple physical disks into a single logical drive.
- Distributes data using a method called striping.
- Provides redundancy for fault tolerance and performance improvement.
- Allows simultaneous I/O from multiple disks.
- Enables data recovery in case of hardware failure.
RAID 0 – Striping (No Redundancy)
- Distributes data across all disks for parallel I/O.
- Improves performance but offers no fault tolerance.
- Suitable for speed-intensive applications.
- One failure results in complete data loss.
RAID 1 – Mirroring
- Duplicates all data across two disks.
- Provides real-time backup and fault tolerance.
- Requires double the disk space.
- Ideal for critical system files.
RAID 2 – Bit-Level Striping with ECC
- Uses synchronized disks and Hamming code for error correction.
- All disks participate in each I/O.
- High reliability but rarely used due to complexity and cost.
- Replaced by modern error-correcting methods.
RAID 3 – Byte-Level Striping with Parity
- Uses one dedicated parity disk.
- Employs parallel access with small strips.
- Can reconstruct data using XOR if a disk fails.
- High data transfer rate but less efficient for multiple small I/O requests.
RAID 4 – Block-Level Striping with Dedicated Parity
- Independent access to each disk.
- One dedicated parity disk stores parity for all data blocks.
- Efficient for high I/O frequency but suffers from write bottlenecks.
RAID 5 – Block-Level Striping with Distributed Parity
- Parity blocks are distributed across all disks.
- Eliminates single parity disk bottleneck.
- Can tolerate one disk failure.
- Balanced performance and fault tolerance.
RAID 6 – Block-Level Striping with Dual Parity
- Uses two parity blocks for each data block.
- Can withstand failure of two disks.
- Excellent data availability and integrity.
- Slightly slower writes due to dual parity updates.
Lecture 8: Cache memory #
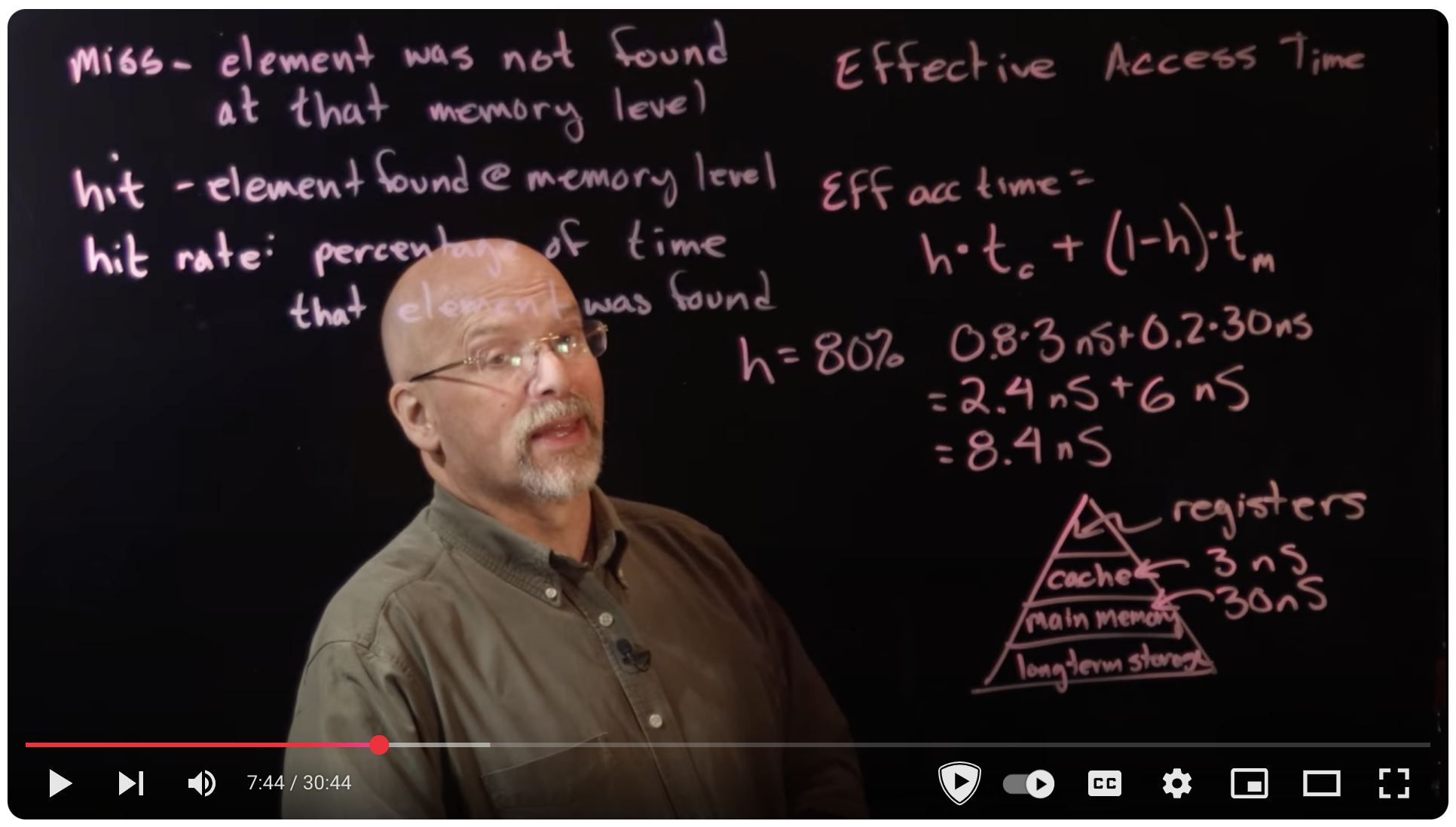
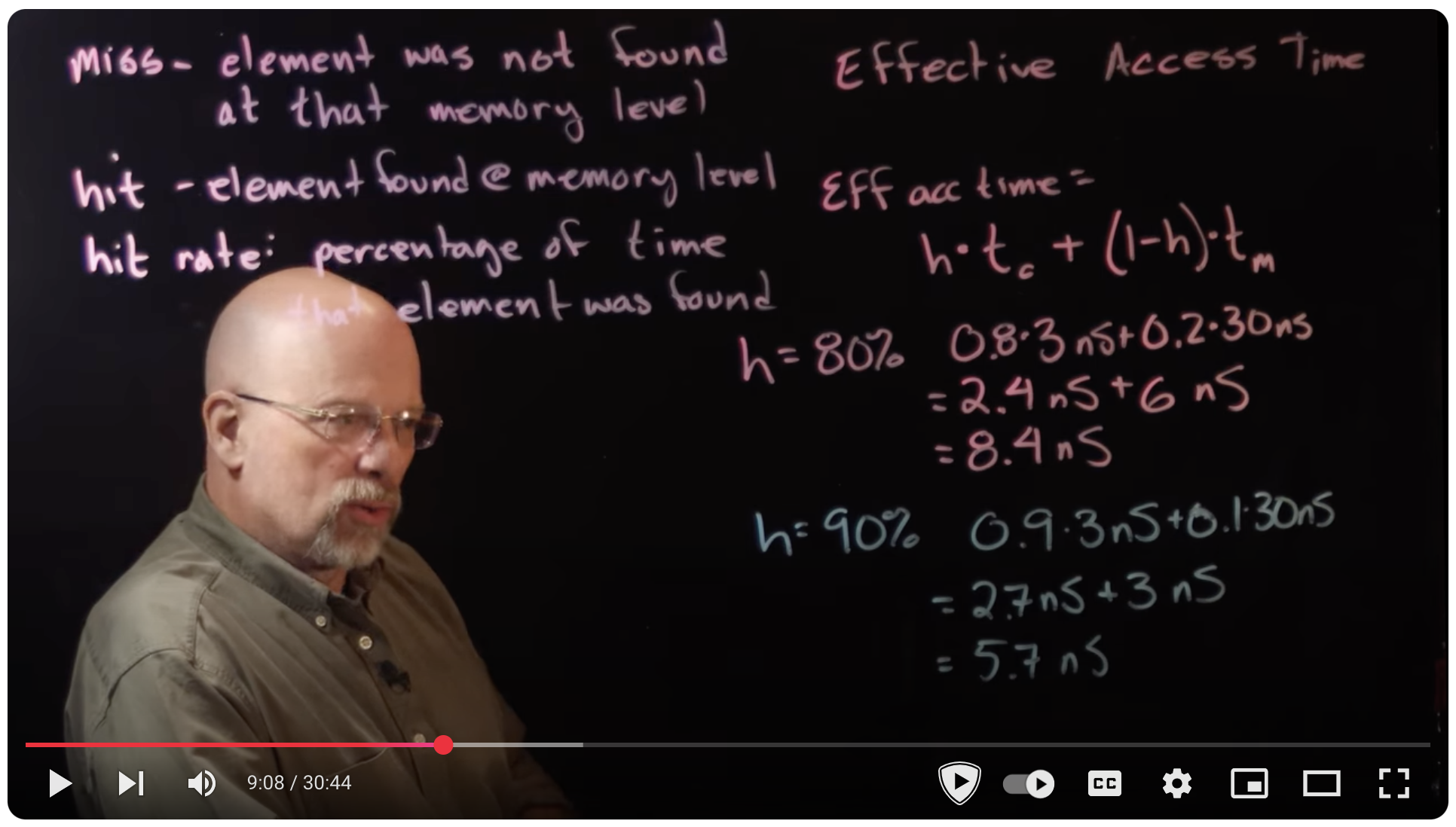
Functions of Cache Memory
- Stores frequently accessed data from main memory.
- Reduces data access latency for the processor.
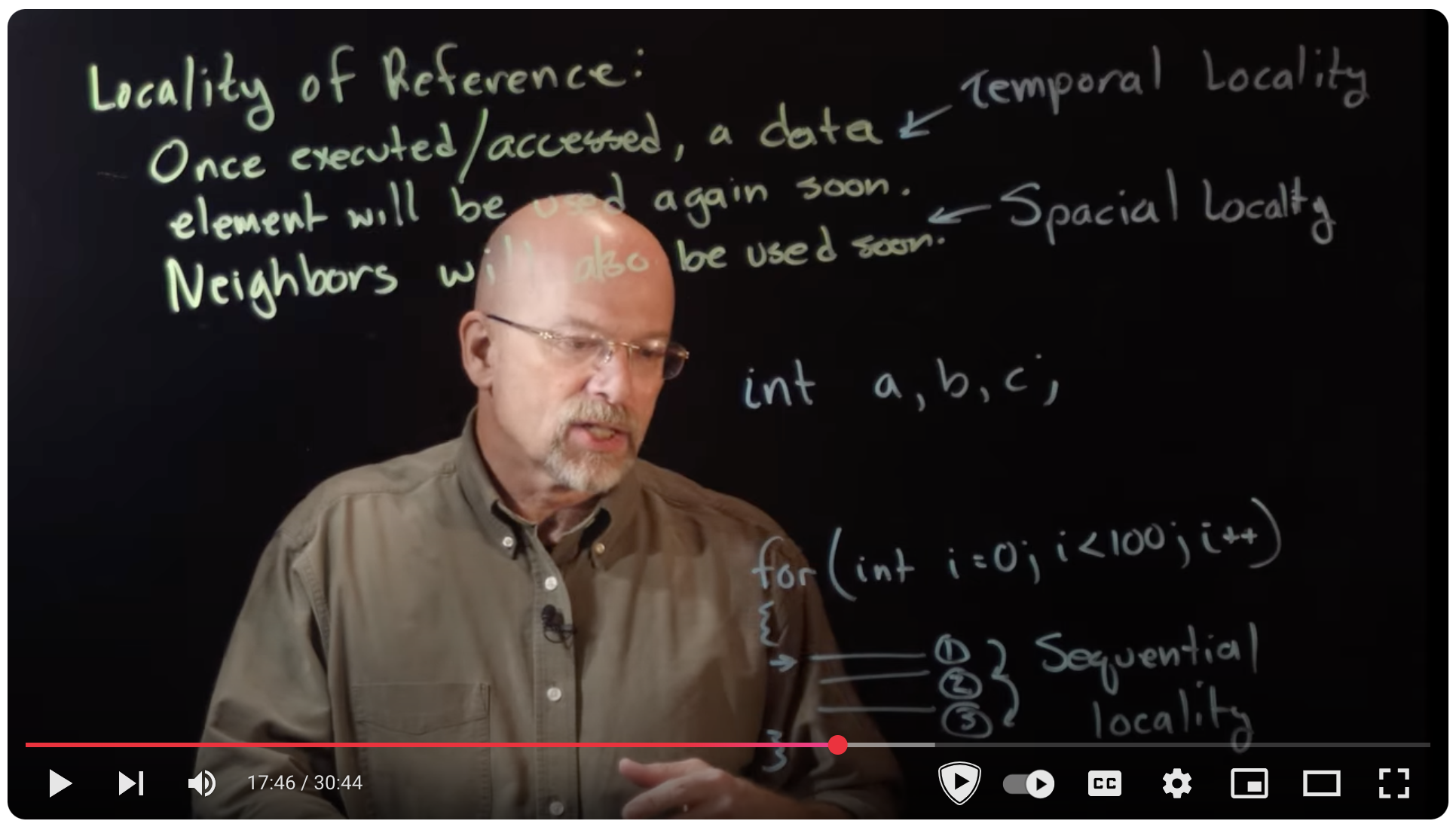
- Exploits the principle of locality (temporal and spatial).
- Acts as an intermediate layer between CPU and main memory.
Cache Hierarchy
- L1 Cache: Closest to the core, fastest access, smallest size.
- L2 Cache: Slower than L1, larger capacity.
- L3 Cache: Shared among cores, largest capacity, highest latency.
- Data flows: Main Memory → L3 → L2 → L1 → Processor.
Cache Access Process
- Cache Hit: Requested data is found in the cache, returned to CPU.
- Cache Miss: Data is not found; fetched from main memory and loaded into cache.
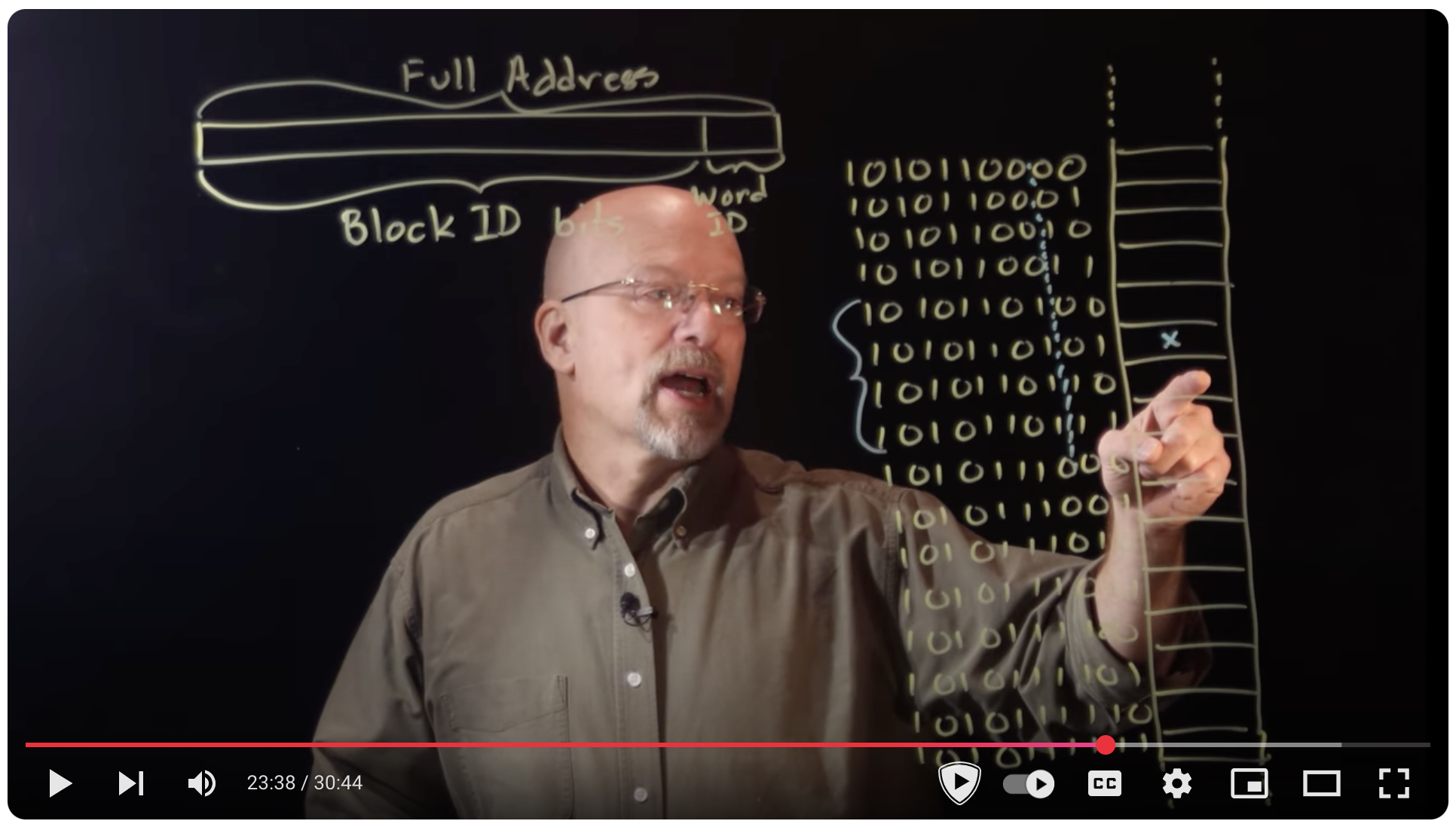
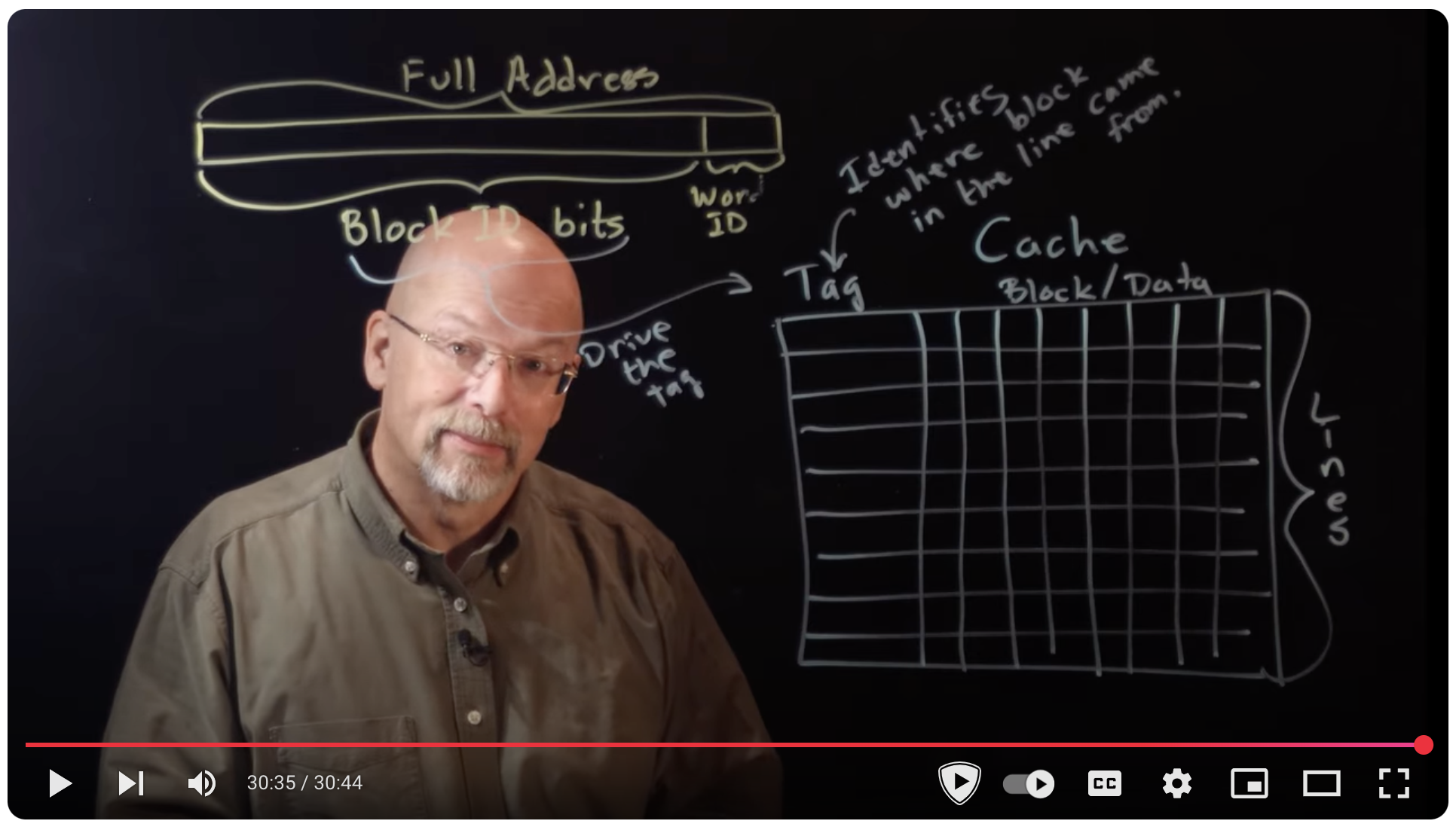
Cache Organization
- Lines and Blocks:
- Cache consists of multiple lines, each holding a block of K words.
- Memory is block-organized; blocks are mapped into cache lines.
- Index: Identifies specific cache line.
- Tag: Portion of memory address to identify which memory block is stored.
- Control Bits: Track if data has been modified (e.g., dirty bit).
Types of Cache Misses
- Cold (Compulsory) Miss: First-time access; block not previously cached.
- Conflict Miss: Multiple data blocks map to the same cache line.
- Capacity Miss: Cache too small to hold all working data blocks.
Block Transfer & Performance
- Cache and memory transfer happens in blocks (commonly 64 bytes or more).
- Processor may start execution with only partial block loaded.
- Efficient block transfer reduces performance penalties of cache misses.
Lecture 9: Cache placement policies #
Functions of Cache Placement Policy
- Determines where a memory block should be placed in the cache.
- Answers key questions:
- Where to place a new memory block?
- How to check if data is already cached?
- Which block to replace when cache is full?
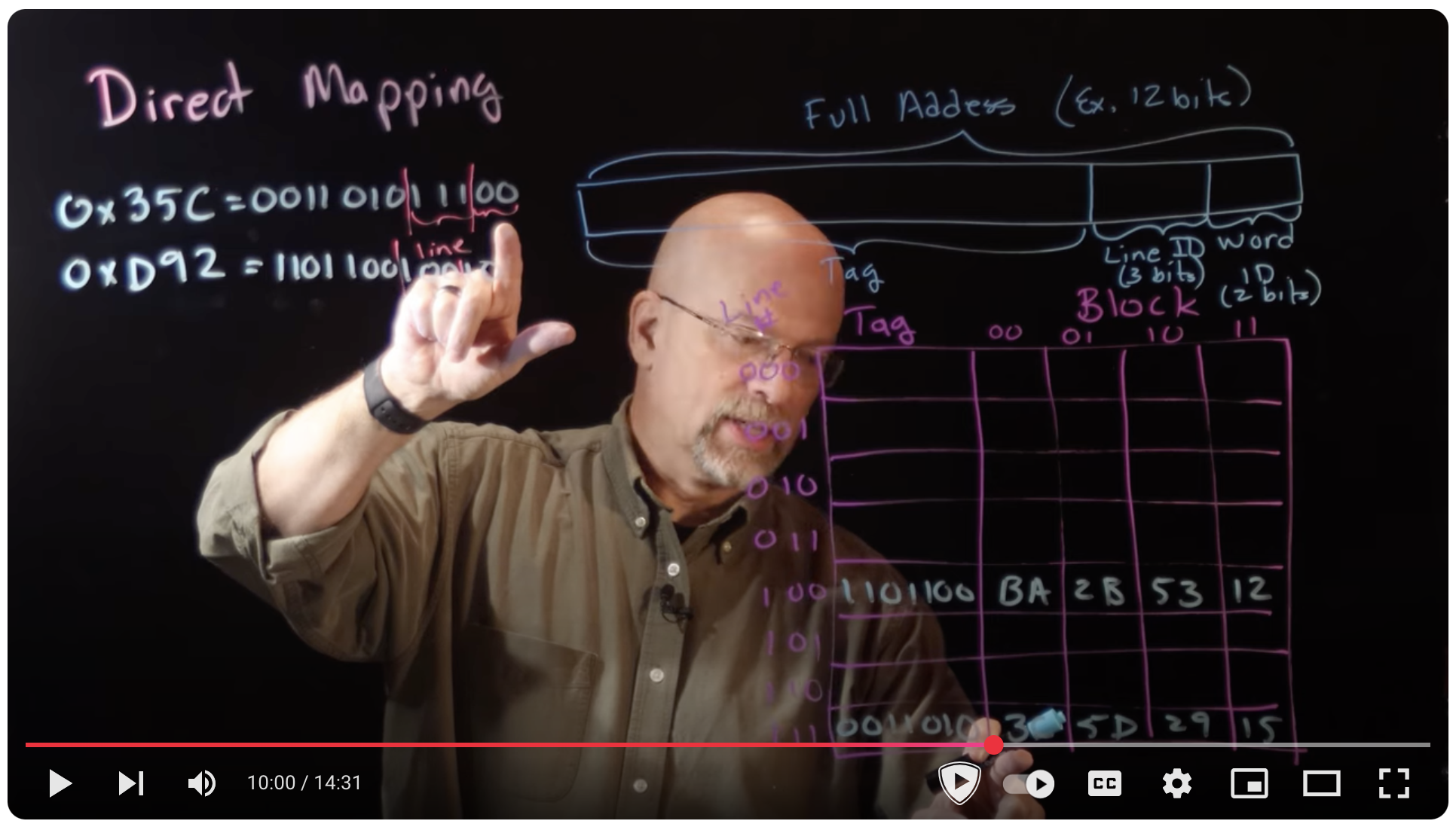
Direct-Mapped Cache
- Each memory block maps to exactly one cache block.
- Uses index bits and tag bits from the memory address.
- Efficient and simple with low power usage.
- Disadvantage: high chance of conflict; low cache hit rate.
Address Mapping in Direct Mapping
- Index: selects the cache block using mod or least significant bits.
- Tag: stores remaining bits to uniquely identify memory blocks.
- Valid bit: marks if the data in the block is valid.
- Larger blocks (e.g., 2 bytes) improve spatial locality.
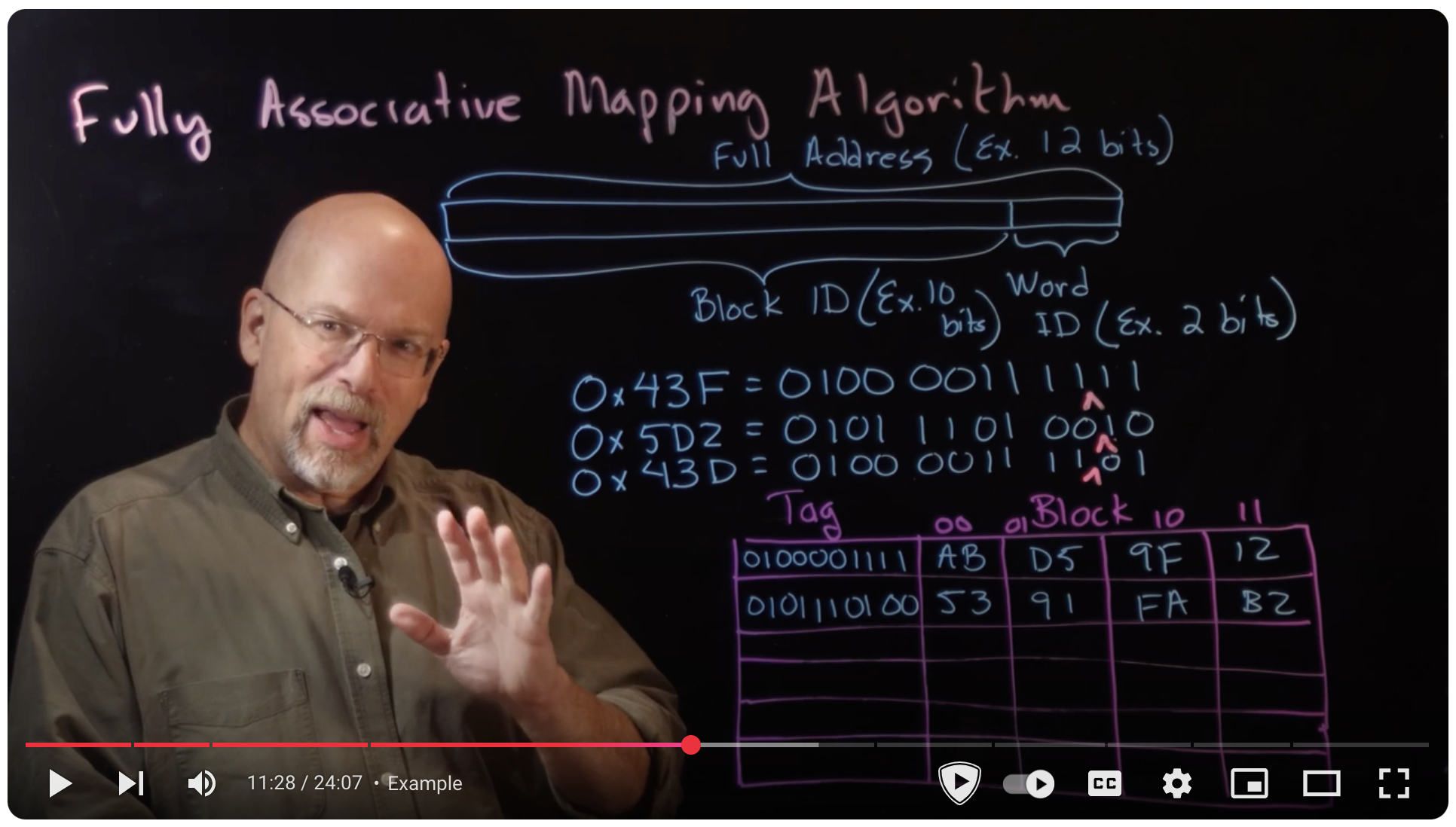
Fully Associative Cache
- Any memory block can go into any cache block.
- No fixed index, entire address is used as tag.
- Flexible and leads to high cache hit rate.
- Disadvantage: requires checking all tags → high computational overhead.
Set-Associative Cache
- Combines features of direct-mapped and fully associative caches.
- Cache divided into sets; each memory address maps to one set.
- Data can go into any block within that set.
- N-way Set Associative: each set contains N blocks.
- 2-way → 4-way → up to fully associative.
Data Lookup and Replacement
- Index bits select set; tags are compared within the set.
- Replacement policy (e.g., LRU) is applied if all blocks in a set are occupied.
- Offers a balance between flexibility and cost.
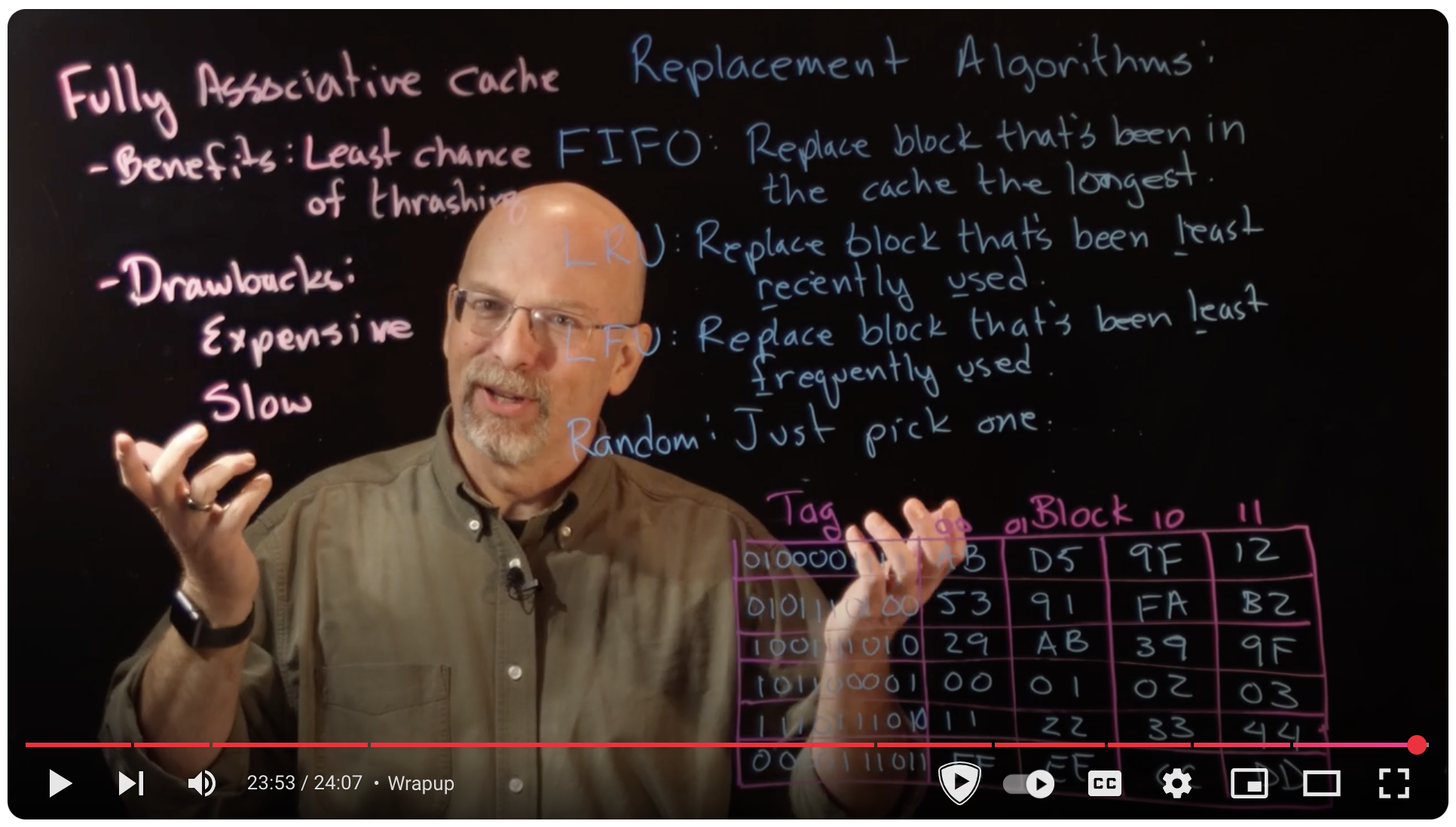
Lecture 10: Cache replacement policies #
Functions of Cache Replacement Policies
- Determine which cache block to evict when the cache is full.
- Maintain cache size within its maximum capacity.
- Improve performance by keeping frequently or recently used data accessible.
- Also referred to as “eviction policies”.
Key Cache Replacement Algorithms
First-In-First-Out (FIFO)
- Evicts the oldest data in the cache.
- Simple and time-based; ignores usage frequency.
- Does not consider whether data is still actively used.
Least Recently Used (LRU)
- Removes the data that hasn’t been used for the longest time.
- Assumes recently used data is more likely to be used again.
- More effective than FIFO in many scenarios.
Least Frequently Used (LFU)
- Evicts data that has been accessed the fewest times.
- May keep recently accessed data if it’s frequently used.
- Can struggle with tracking and updating usage counts.
Most Recently Used (MRU)
- Opposite of LRU; evicts the most recently accessed data.
- Useful in certain edge cases where older data is more valuable.
- Less common than LRU or LFU.
Further material #
- An introduction to disk drive modeling | IEEE Journals & Magazine | IEEE Xplore
- An empirical analysis of the IEEE-1394 serial bus protocol | IEEE Journals & Magazine | IEEE Xplore
Week 8: Concurrency #
概要
We begin our study of concurrency by describing how to use it in practice. First, we explain where the concurrency in a system comes from and discuss the main ways to express concurrency. Then we describe the difference between ‘hard’ and ’easy’ concurrency: the latter is done by locking shared data before you touch it, the former in subtle ways that are so error-prone that simple prudence requires correctness proofs. We give the rules for easy concurrency using locks and discuss various issues that complicate the easy life: scheduling, locking granularity and deadlocks.
キーコンセプト
This topic includes:
- concurrent programming
- synchronisation
- thread-level parallelism.
レクチャーリスト
- Mutual exclusion and synchronisation
- Lecture 1: Introduction to concurrency
- Lecture 2: Mutual exclusion: Software approaches
- Lecture 3: Principles of concurrency
- Lecture 4: Mutual exclusion: Hardware support
- Lecture 5: Semaphores
- Lecture 6: Monitors
- Lecture 7: Message passing
- Lecture 8: The readers/writers problem
- Deadlock and Starvation
- Lecture 9: Principles of deadlock
- Lecture 10: Deadlock detection, avoidance and prevention
- Lecture 11: An integrated deadlock strategy
Lecture 1: Introduction to concurrency #
今週の講義で学習することの全体像の説明。
Lecture 2: Mutual exclusion: Software approaches #
Functions of Mutual Exclusion
- Prevents multiple processes from accessing shared resources simultaneously.
- Ensures consistent behavior in concurrent systems.
- Protects critical sections — code areas where shared resources are accessed.
Contexts of Concurrency
- Multiprogramming: Multiple processes share CPU time.
- Modular Programming: Complex applications broken into concurrent processes.
- Operating Systems: Often implemented as multiple concurrent threads/processes.
Requirements for Mutual Exclusion
- Only one process can be in its critical section at a time.
- A process halted outside its critical section must not interfere with others.
- No deadlock or starvation should occur when requesting access.
- If no process is in the critical section, one requesting should be granted access promptly.
- A process should spend only a limited time in the critical section.
Key Concepts
- Critical Section: Code that accesses shared resources.
- Entry Section: Checks and waits for access to the critical section.
- Exit Section: Releases the critical section and notifies others.
- Atomic Action: Execution of the critical section is complete and uninterrupted.
Issues in Multithreading
- Thread Interference: Concurrent threads interleave operations on shared data.
- Memory Consistency Errors: Threads have inconsistent views of shared memory.
Software Solutions
- Dekker’s Algorithm:
- Uses flags and a turn variable to alternate access.
- Complex but provides strict mutual exclusion.
- Peterson’s Algorithm:
- Simpler and more elegant.
- Uses an array of flags and a turn variable.
- Widely studied and used in educational settings.
Lecture 3: Principles of concurrency #
Functions of Concurrency
- Enables interleaved or overlapping execution of processes.
- Improves CPU utilization and system efficiency.
- Occurs in single-processor (interleaving) and multiprocessor (parallel) systems.
Key Concepts
- Critical Resource: A shared resource requiring exclusive access.
- Critical Section: Part of the code that accesses a critical resource.
- Thread Switching: OS may pause/resume threads mid-instruction.
- Shared Mutable State: A variable shared between threads that can be modified.
Concurrency Issues
- Race Conditions:
- Occur when outcome depends on the timing/order of thread execution.
- Example: Two threads increment a shared variable
isimultaneously, causing incorrect results.
- Read-Modify-Write Sequence:
- A common pattern in critical sections.
- Must be atomic to prevent interference.
- Thread Interruption:
- Threads can be paused mid-update, leading to inconsistent states.
- Context switching can interrupt one thread and allow another to operate on outdated data.
Example
- Thread 1 and Thread 2 both read and increment variable
i. - If Thread 1 is interrupted before writing back, and Thread 2 updates
i, Thread 1 may overwrite Thread 2’s result. - Final value depends on execution order → race condition.
OS Responsibilities in Concurrency
- Track active processes via process control blocks (PCBs).
- Allocate/deallocate resources fairly (CPU time, memory, files, I/O).
- Protect process memory and resources from unintended access.
- Ensure process output is independent of execution speed.
Lecture 4: Mutual exclusion: Hardware support #
Functions of Hardware Support for Mutual Exclusion
- Enables safe concurrent access to shared resources.
- Provides low-level mechanisms that enforce atomicity.
- Complements software-based synchronization in both uniprocessor and multiprocessor systems.
Interrupt Disabling (Uniprocessor Systems)
- Prevents context switches by disabling interrupts during critical section execution.
- Guarantees mutual exclusion in single-processor systems.
- Simple and effective but:
- Cannot be used in multiprocessor environments.
- Reduces system responsiveness and efficiency.
Limitations in Multiprocessor Systems
- Multiple processors can access shared memory simultaneously.
- Disabling interrupts on one CPU does not affect others.
- Requires hardware-based synchronization primitives.
Hardware Atomic Instructions
- Special machine instructions enforce mutual exclusion by:
- Performing multiple actions (e.g., read + write) atomically.
- Locking memory location during instruction execution.
- Examples: Test-and-Set, Compare-and-Swap.
Advantages
- Works on both single and multiprocessor systems.
- Simple, fast, and easy to verify.
- Supports multiple independent critical sections via different control variables.
Disadvantages
- Busy waiting wastes CPU time while waiting for resource access.
- Starvation may occur if some processes are continually bypassed.
- Risk of deadlock when high-priority processes block low-priority ones holding a resource.
Lecture 5: Semaphores #
Functions of Semaphores
- Used for process synchronization and signaling.
- Help enforce mutual exclusion.
- Prevent race conditions by controlling access to shared resources.
Types of Semaphore Operations
- semWait(s):
- Decrements the semaphore
s. - If
sbecomes negative, the process is blocked.
- Decrements the semaphore
- semSignal(s):
- Increments the semaphore
s. - If the result is ≤ 0, a blocked process (if any) is unblocked.
- Increments the semaphore
Types of Semaphores
- Counting Semaphore:
- Holds a non-negative integer value.
- Supports multiple resource instances.
- Used when multiple processes can access a limited resource concurrently.
- Binary Semaphore:
- Holds only 0 or 1 (like a lock).
- Used for mutual exclusion.
- If
s = 0,semWaitblocks the process. - If
s = 1,semWaitsetss = 0and proceeds. semSignalsetss = 1or unblocks a waiting process.
Queue Behavior
- Strong Semaphore:
- Uses FIFO queue.
- Longest-waiting process is released first.
- Guarantees freedom from starvation.
- Weak Semaphore:
- No specific order for unblocking.
- May lead to starvation.
Mutual Exclusion via Semaphores
- Only one process can manipulate a semaphore at a time.
- Prevents simultaneous modification of shared resources.
- Can use:
- Software-based methods (e.g., Dekker’s, Peterson’s) – high overhead.
- Hardware-based methods (e.g., atomic instructions, interrupt disabling) – more efficient.
Lecture 6: Monitors #
Functions of Monitors
- A high-level synchronization construct for managing concurrent threads.
- Ensures mutual exclusion and coordination between threads.
- Encapsulates shared data and the procedures that access them.
Monitor Structure
- Contains:
- Local data variables (accessible only within the monitor).
- Initialization code.
- One or more procedures (monitor regions).
- Only one thread may execute inside a monitor at a time.
- Threads must acquire the monitor before executing its procedures.
Mutual Exclusion and Cooperation
- Mutual Exclusion:
- Only one thread can execute within a monitor region at a time.
- Protects shared resources from race conditions.
- Cooperation:
- Threads work together by waiting for and signaling conditions.
- Example: A reader thread waits for data to be written by a writer thread.
Condition Variables
- Special variables used for thread synchronization inside a monitor.
- Two key operations:
C.wait():- Suspends the calling thread.
- Releases the monitor for other threads.
C.signal():- Wakes up one thread waiting on the condition
C, if any.
- Wakes up one thread waiting on the condition
Monitor Behavior (Analogy)
- Monitor Entry Set = Hallway (threads waiting to enter monitor).
- Wait Set = Waiting Room (threads waiting on a condition).
- Critical Section / Exclusive Room = Room where only one thread is allowed.
- Scheduler = Chooses which thread can enter the monitor next.
Thread Actions in Monitor
- Entering the monitor = Entering the building.
- Acquiring the monitor = Entering the exclusive room.
- Releasing the monitor = Leaving the exclusive room.
- Waiting on a condition = Going to the waiting room.
- Being signaled = Returning from waiting room to exclusive room.
Lecture 7: Message passing #
Functions of Message Passing
- Facilitates communication and synchronization between processes.
- Useful in single systems, multiprocessor systems, and distributed systems.
- Can be used to implement mutual exclusion.
Message Passing Primitives
send(destination, message)receive(source, message)- Sender may wait (blocking) or proceed (non-blocking).
- Receiver may wait for message or skip if none is available.
Synchronization Requirements
- Receiver cannot receive before a message is sent.
- Synchronization ensures both sender and receiver are coordinated.
Addressing Mechanisms
- Direct Addressing:
- Sender specifies the recipient directly.
- Receiver may specify the sender or receive from any.
- Indirect Addressing:
- Uses mailboxes (message queues) shared among processes.
- Allows decoupling of sender and receiver.
- Supports one-to-one, one-to-many, many-to-one, and many-to-many models.
Message Structure
- Messages may be fixed or variable in length.
- Typically divided into:
- Header: Contains metadata (source, destination, type, etc.)
- Body: Contains actual message data.
- May include fields for:
- Message type
- Sequence number
- Priority
- Links (for message chaining)
Queuing Policy
- Default: FIFO (First-In-First-Out).
- Optionally: priority-based or custom selection criteria by receiver.
Mutual Exclusion via Message Passing
- Shared mailbox initialized with a single token-like message.
- Process must receive the message to enter its critical section.
- After executing, the process sends the message back to the mailbox.
- Ensures only one process enters the critical section at a time.
Lecture 8: The readers/writers problem #
The Readers/Writers Problem
- A classic synchronization problem involving shared data access.
- Readers: Only read the data; multiple readers can read simultaneously.
- Writers: Modify the data; only one writer can access at a time.
- No readers are allowed while a writer is writing.
- Writers must exclude all other readers and writers.
Mutual Exclusion Strategy
- The section of code that accesses shared data is considered a critical section.
- Writers require full mutual exclusion.
- Readers do not need to exclude other readers.
Semaphore-Based Solutions
- Semaphores are used to enforce mutual exclusion for both readers and writers.
- Writers gain exclusive access: block both readers and other writers.
- Readers share access: multiple readers may access simultaneously if no writer is active.
Potential Issues
- Starvation of Writers:
- If readers continuously access the data, writers may be blocked indefinitely.
- This occurs if new readers are always allowed in while writers are waiting.
Solutions to Prevent Starvation
- Block New Readers:
- When a writer indicates intent to write, prevent new readers from entering.
- Existing readers complete, then writer gets access.
- Priority Messaging System:
- A controller process manages access requests via message passing.
- Three mailboxes handle different message types (e.g., read request, write request).
- Writer requests are prioritized by the controller using message metadata.
Lecture 9: Principles of deadlock #
Definition of Deadlock
- A permanent blocking of a set of processes.
- Occurs when each process is waiting for an event that can only be triggered by another blocked process.
- Common in systems where processes compete for shared resources.
Example
- Thread 1 locks Resource A and waits for Resource B.
- Thread 2 locks Resource B and waits for Resource A.
- Both threads are blocked by each other — a deadlock.
Necessary Conditions for Deadlock
- Mutual Exclusion:
- Only one process can use a resource at a time.
- Shared resources cannot be simultaneously accessed.
- Hold and Wait:
- A process holding at least one resource is waiting to acquire additional resources held by others.
- No Preemption:
- Resources cannot be forcibly taken from processes; must be released voluntarily.
- Circular Wait:
- A circular chain of processes exists, each waiting on a resource held by the next.
Lecture 10: Deadlock detection, avoidance and prevention #
Deadlock Strategies Overview
- No single strategy works in all situations.
- Three main approaches:
- Detection
- Avoidance
- Prevention
Deadlock Detection
- Resources are granted freely when available.
- System periodically checks for circular wait conditions.
- Detection uses a request matrix:
- Tracks resource requests per process.
- Marks processes that can finish and release resources.
- Unmarked rows at the end = deadlocked processes.
Deadlock Prevention
- Prevents one or more of the necessary conditions for deadlock:
- Mutual Exclusion:
- Allow shared access where possible (e.g., read-only).
- Hold and Wait:
- Require processes to request all needed resources at once.
- Inefficient and often unrealistic.
- No Preemption:
- Force processes to release resources before making new requests.
- Requires rollback or recovery mechanisms.
- Circular Wait:
- Impose a strict ordering on resource acquisition.
- Mutual Exclusion:
Deadlock Avoidance
- Allows all conditions for deadlock but avoids unsafe states.
- Makes dynamic decisions to avoid reaching a deadlock.
- Two approaches:
- Do not start a process if it might eventually cause deadlock.
- Do not grant a resource request if it might lead to deadlock later.
- Allows more concurrency than prevention.
Lecture 11: An integrated deadlock strategy #
Integrated Deadlock Strategy
- Combines multiple techniques (prevention, avoidance, detection).
- Resources are grouped into resource classes.
- Circular wait between classes is prevented via linear resource ordering.
- Within each class, different strategies may be applied.
Swappable Space
- Prevention strategy: All required resources must be allocated at once.
- Effective if maximum resource needs are known in advance.
- Related to hold-and-wait prevention.
- Avoidance is also possible if requirements are declared early.
Process Resources
- Avoidance strategy is effective: processes declare required resources ahead of time.
- Prevention by ordering is also applicable.
- Suitable for resources like open files or I/O devices.
Main Memory
- Prevention via preemption:
- A process can be swapped out to secondary memory.
- Frees space to resolve potential deadlocks.
Internal Resources
- Prevention via resource ordering:
- Ensures resources are requested in a fixed global order.
- Helps prevent circular wait conditions.
Week 9: Protection and security #
概要
In this topic we provide an overview of security threats. We begin with a discussion of what we mean by computer security. Computer security deals with computer related assets that are subject to a variety of threats and for which various protection measures are taken. We examine two broad categories of computer and network security threats: intruders and malicious software. Cryptographic algorithms, such as encryption and hash functions, play a role both in computer security threats and computer security techniques.
キーコンセプト
This topic includes:
- security threats
- viruses
- worms
- bots
- rootlet
- cryptographic algorithms.
レクチャーリスト
- Computer security
- Lecture 1: Introduction to protection and security
- Lecture 2: Threats, attacks and assets
- Lecture 3: Intruders
- Malicious Software
- Lecture 4: Viruses, worms and bots
- Lecture 5: RootkitsPage
- Lecture 6: Encryption
Lecture 1: Introduction to protection and security #
今週の講義で学習することの全体像の説明。
Lecture 2: Threats, attacks and assets #
Threats, Attacks, and Assets
- The OS plays a key role in ensuring system security and reliability.
- A reliable OS must prevent data loss from crashes or unauthorized access.
User Accounts and Privileges
- Users are assigned accounts with:
- Username and password
- Privileges defined by an administrator
- Administrators can:
- Modify system settings
- Manage users and privileges
- Install or remove software
Auditing and Monitoring
- Auditing software logs:
- Failed login attempts
- Suspicious activity
- Potential sniffing software
- Helps detect unauthorized access or system misuse
Types of Attacks
- Internal Attacks
- Authorized users elevate privileges or bypass access controls
- Memory or file managers may be tricked into exposing protected resources
- External Attacks
- Remote login abuse
- Brute-force password attacks
- Hacking tools available for purchase make attacks easier
CPU-Level Security
- Modern CPUs support privilege levels:
- Privileged Mode: full instruction set, memory/register access
- Non-Privileged Mode: limited instruction set
- Memory protection: upper/lower bounds restrict access
- Privileged instructions are restricted to protect system integrity
Lecture 3: Intruders #
Intruders
- Most computers today are connected to networks, especially the internet.
- This exposes systems to external intruders and various forms of cybercrime:
- Vandalism
- Denial-of-service (DoS) attacks
- Intellectual property theft
Targets of Attack
- Attacks typically target:
- Software vulnerabilities
- Hardware components
- End users (considered weak links)
Evolving Threat Landscape
- Earlier threats included worms (e.g., CodeRed).
- Modern concerns focus on:
- Spyware
- Trojan horses
- Botnets
- The internet is now the primary attack vector.
Goals of Intruders
- Gain unauthorized access to systems
- Escalate privileges
- Steal credentials (e.g., password databases)
Severity of Intrusions
- Benign: Curious individuals exploring systems
- Malicious: Reading/modifying data or disrupting operations
Types of Intruders
- Masquerader
- External attacker
- Gains access via stolen credentials or bypassing authentication
- Misfeasor
- Internal legitimate user
- Abuses existing privileges to access unauthorized resources
- Clandestine User
- Insider or outsider
- Gains administrative control and disables security mechanisms (e.g., auditing)
Lecture 4: Viruses, worms and bots #
Types of Malware Attacks
- Malware can be:
- Local (installed like regular software)
- Remote (executed from another computer over a network)
Local Software Attacks
- Virus
- Infects host programs
- Executes with host
- May replicate or cause damage (e.g., data corruption)
- Worm
- Autonomous program that spreads via networks
- Replicates rapidly, consuming resources
- Can significantly degrade system/network performance
- Trojan Horse
- Disguised as a legitimate program
- Lies dormant until triggered (date or signal)
- Often spread via email attachments
- Spyware
- Collects and transmits user activity data
- Used for:
- Tracking keypresses (passwords, credit cards)
- Building user profiles
- Corporate/industrial espionage
Remote Software Attacks
- Denial of Service (DoS)
- Floods a system (e.g., web server) with requests
- Overloads memory and crashes system
- Distributed Denial of Service (DDoS)
- DoS attack launched from multiple compromised machines (botnet)
- Botnets may be rented out for profit
Phishing
- Social engineering attack via email
- Poses as a legitimate institution to request sensitive info
- Often used to steal:
- Personal information
- Login credentials
- Financial data
Lecture 5: RootkitsPage #
What is a Rootkit?
- A type of malware that provides unauthorized admin-level access to a device.
- Operates near or within the OS kernel, hiding its presence.
- Can target software, firmware, and even hardware.
Installation Methods
- Exploiting vulnerabilities (unpatched OS/software)
- Bundled malware (infected PDFs, pirated media, shady apps)
- Phishing attacks (user unknowingly installs malware)
Rootkit Capabilities
- Hide other tools (e.g. keyloggers)
- Launch DDoS attacks or send spam
- Disable antivirus and security patches
- Provide persistent, stealthy access
Types of Rootkits
- Hardware/Firmware Rootkits
- Target BIOS, routers, or hard drives
- Hard to detect and remove
- Bootloader Rootkits
- Replace OS bootloader
- Load before OS starts
- Memory Rootkits
- Reside in RAM, vanish on reboot
- Affect performance and remain stealthy
- Application Rootkits
- Replace or alter standard programs (e.g. Notepad, Paint)
- Hard to detect by users, often caught by antivirus
- Kernel-Mode Rootkits
- Modify OS kernel functions
- Extremely dangerous; deep system control
- Virtual Rootkits
- Host the OS as a virtual machine
- Avoid modifying the actual OS directly
Famous Example
- Stuxnet (2010)
- Worm that targeted Iranian nuclear facilities
- Likely state-sponsored (believed to be U.S. and Israel)
- Highlighted the use of rootkits in cyber warfare
Lecture 6: Encryption #
Encryption: An Overview
Cryptography vs Encryption
- Cryptography: Study of secure communication.
- Encryption: A cryptographic tool used to encode data so unauthorized parties can’t understand it.
Why Encryption Matters
- Traditional methods like passwords are vulnerable to attacks.
- Encryption ensures confidentiality, even if data is intercepted.
HTTPS and Secure Communication
- HTTP → HTTPS: Secure version using TLS (Transport Layer Security).
- TLS succeeded SSL (Secure Sockets Layer).
- Browsers show a padlock icon to indicate secure TLS communication.
Types of Encryption
- Symmetric-Key Encryption
- Uses a single key for both encryption and decryption.
- Faster but requires secure key sharing.
- Used in HTTPS, SSL, and securing local data.
- Public-Key Encryption (Asymmetric)
- Uses two keys:
- Public Key: Used to encrypt data.
- Private Key: Used to decrypt data.
- Public key is shared, private key is kept secret.
- Adds security for data transmission.
- Uses two keys:
Certificates and Trust
- Challenge: Making sure the public key belongs to the right party.
- Solution: Certificates issued by Certificate Authorities (CAs).
- Validate ownership of keys.
- Web browsers are shipped with trusted CAs.
- Users can inspect certificates of websites.
Further material #
- What is Phishing | Barracuda Campus
Week 9: Multiple processor systems, network programming and the internet #
概要
We study how computers are linked together to share information and resources. Our study will include the construction and operation of networks, applications of networks, multiple processor and multi-core systems. We will also discuss the role of the graphics processing unit (GPU) in modern computing environments.
キーコンセプト
This topic includes:
- multiple processor systems
- network programming
- the internet
- The world wide web
- internet protocols
- client-server.
レクチャーリスト
- Multiple processor systems (MPS)
- Lecture 1: Introduction to multiple processor systems, network programming and the internet
- Lecture 2: Multiprocessor and multicore scheduling
- Lecture 3: Multicore computers – Hardware and software performance
- Computer networks
- Lecture 4: Network fundamentals
- Lecture 5: The internet
- Lecture 6: Internet protocols
Lecture 1: Introduction to multiple processor systems, network programming and the internet #
今週の講義で学習することの全体像の説明。
Lecture 2: Multiprocessor and multicore scheduling #
Multiprocessor and Multicore Scheduling
- Most modern systems contain multiple processors, requiring specialized scheduling strategies.
Types of Multiprocessor Systems
- Loosely Coupled: Each processor has separate memory and I/O channels.
- Functionally Specialized: A general-purpose processor is assisted by embedded specialized processors.
- Tightly Coupled: Processors share main memory and are managed by the operating system.
Granularity in Parallelism
- Granularity refers to the ratio of computation time to communication time.
- It affects scheduling efficiency and system performance.
Categories of Parallelism by Granularity
- Independent Parallelism: No synchronization; similar to multiprogramming on a uniprocessor.
- Coarse and Very Coarse-grained: Some synchronization; requires minimal software changes.
- Medium-grained: Threads within a single process; requires explicit coordination.
- Fine-grained: Many small tasks; enables load balancing but increases overhead.
Levels of Parallelism
- Instruction Level: Approximately 20 instructions.
- Loop Level: Approximately 500 instructions.
- Procedure Level: A few thousand instructions.
- Application Level: Tens of thousands of instructions.
Design Considerations for Scheduling
- Process Assignment: Can be dynamic or dedicated; affects scheduling overhead.
- Multiprogramming on Processors: Enables better utilization and performance.
- Process Dispatching: Simpler methods like FIFO may be sufficient for systems with few processors.
Thread Usage in Multiprocessor Systems
- Threads enable concurrent execution in shared memory space.
- Thread switching is cheaper than process switching.
- Parallel execution of threads across processors improves performance.
Multiprocessor Scheduling Strategies
- Load Sharing: Global ready queue; idle processors pick threads from it.
- Gang Scheduling: Related threads are scheduled to run simultaneously on dedicated processors.
- Dedicated Processor Assignment: Fixed allocation of processors to threads for the entire program duration.
- Dynamic Scheduling: The number of threads may change during execution.
Multicore Thread Scheduling
- Similar to multiprocessor scheduling.
- Operating systems like Windows and Linux perform load balancing.
- Standard strategies may not fully utilize multicore performance.
Lecture 3: Multicore computers – Hardware and software performance #
Multicore Computers and Real-Time Scheduling
- Real-time computing is increasingly important, especially for systems responding to external events.
Real-Time Tasks
- Hard Real-Time Tasks: Must meet deadlines; failure can cause fatal errors.
- Soft Real-Time Tasks: Preferable to meet deadlines, but not mandatory.
- Periodic Tasks: Occur at regular intervals.
- Aperiodic Tasks: Occur irregularly, with specific start/finish deadlines.
Real-Time Operating System Characteristics
- Determinism: Ability to perform operations at predefined times. Depends on interrupt handling speed and system capacity.
- Responsiveness: Time taken to acknowledge and process an interrupt. Affected by interrupt handling and system hardware.
- Response Time: Combination of determinism and responsiveness, critical for meeting timing requirements.
- User Control: Users can adjust task priorities, memory usage, and scheduling policies.
- Reliability: Essential for real-time systems; failures can lead to serious consequences (e.g., in aviation or medical systems).
- Fail-Soft Operation: System should continue operation with minimal loss and maintain stability for critical tasks.
Real-Time Scheduling Strategies
- Static Table-Driven Approaches: Predefined execution schedules created via static analysis.
- Static Priority-Driven Preemptive Approaches: Priorities are assigned via static analysis; no fixed schedule created.
- Dynamic Planning-Based Approaches: Feasibility is analyzed at runtime before accepting a task.
- Dynamic Best-Effort Approaches: No feasibility check; system attempts to meet all deadlines and aborts missed ones.
Lecture 4: Network fundamentals #
Networks and Network Communication
- Networks allow data and resource sharing among multiple users and computers.
- Network software has evolved from simple utilities to complex communication systems supporting billions of devices.
Types of Networks
- Personal Area Network (PAN): Short-range connections (e.g., wireless keyboard/mouse).
- Local Area Network (LAN): Connects computers within a building (e.g., offices, file and printer sharing).
- Metropolitan Area Network (MAN): Covers a community or city-sized area.
- Wide Area Network (WAN): Covers large geographical distances (e.g., the Internet).
Network Topologies
- Bus Topology: All devices connected to a single communication line (logical bus).
- Star Topology: Devices connected to a central node (access point).
- The distinction lies in whether communication is direct or mediated by a central device.
Protocols
- Protocols define rules for network communication.
- Ethernet-based bus networks use CSMA/CD (Carrier Sense Multiple Access with Collision Detection).
- Devices listen before transmitting and handle collisions with random delays.
Combining Networks
- Repeaters: Extend signals across long buses.
- Bridges: Forward messages based on destination addresses; filter unnecessary traffic.
- Switches: Multi-port bridges connecting several buses like wheel spokes.
Process Communication
- Inter-Process Communication (IPC): Processes exchange data to coordinate.
- Client-Server Model: Clients request services from a server (e.g., print servers).
- Peer-to-Peer (P2P) Model: Processes act as both service providers and consumers (e.g., messaging, games).
Distributed Systems
- Cluster Computing: Independent computers work together like a supercomputer.
- Grid Computing: Loosely coupled systems using idle computing resources (e.g., scientific projects).
- Cloud Computing: Virtualized, on-demand computing resources (e.g., AWS EC2).
Lecture 5: The internet #
The Internet
- The Internet (capital I) is a global system of interconnected networks that originated from 1960s research.
- Its purpose was to enable communication across networks and maintain connectivity despite local disruptions.
Internet Structure and ISPs
- The Internet is organized hierarchically through Internet Service Providers (ISPs).
- Tier 1 ISPs: High-speed, global backbones of the Internet.
- Tier 2 ISPs: Regional providers connected to Tier 1.
- Tier 3 (Access) ISPs: Provide connections to individual homes and businesses.
- End systems or hosts (e.g., PCs, smartphones) connect to the Internet through access ISPs.
IP Addressing and Domain Names
- Devices on the Internet are assigned unique IP addresses (e.g., 192.168.0.1).
- IP address allocation is managed by ICANN and distributed to ISPs in blocks.
- Domain names offer a human-readable alternative to IPs and must be registered through ICANN-approved registrars.
- DNS (Domain Name System) translates domain names into IP addresses via name servers.
- A DNS lookup is used to resolve a domain name to an IP address.
Internet Applications
- Early applications included email, basic web browsing, and text messaging.
- Email uses applications like Outlook or Thunderbird and is transmitted using network protocols.
- VoIP (Voice over Internet Protocol) allows voice communication over the Internet (e.g., Skype, Zoom).
- Streaming audio and video (e.g., Netflix) now dominates Internet traffic.
Streaming Methods
- Unicast: One sender transmits data to one receiver.
- En-unicast: One sender transmits to many receivers individually.
- Multicast: One sender sends a single message to multiple clients via special routing.
- Most media services use OnDemand unicast streaming.
Content Delivery Networks (CDNs)
- CDNs are distributed server networks that store and deliver media closer to end users.
- They reduce latency and improve scalability for large-scale streaming platforms.
Lecture 6: Internet protocols #
Internet Protocols
- Internet communication is managed through a four-layer hierarchy: application, transport, network, and link layers.
- Each layer consists of software responsible for different stages of message transmission.
Application Layer
- Contains software (clients/servers) for tasks like file transfers and media playback (e.g., FTP).
- Uses DNS to translate domain names to IP addresses.
- Sends and receives messages through the transport layer.
Transport Layer
- Ensures proper message formatting and breaks long messages into packets.
- Adds sequence numbers for reassembly at the destination.
- Passes packets to the network layer for routing.
- Receives packets from the network layer and reconstructs the original message.
- Uses port numbers to direct messages to appropriate application software.
Network Layer
- Decides packet routing based on forwarding tables.
- Determines the next hop and passes packets to the link layer.
- Recognizes when packets reach their destination and passes them to the transport layer.
Link Layer
- Handles the physical and data link aspects of transmission.
- Responsible for the actual transfer of packets across physical network hardware.
Port Numbers and Conventions
- Port numbers help identify which application should receive data (e.g., port 25 for SMTP email).
- Applications listen on specific ports to receive relevant packets.
TCP/IP Protocol Suite
- Collection of standards supporting internet communication.
- Includes protocols like TCP (Transmission Control Protocol) and IP (Internet Protocol).
TCP vs UDP
- TCP (Reliable Protocol):
- Connection-oriented.
- Ensures delivery with acknowledgments and packet retransmissions.
- Suitable for applications where reliability is crucial (e.g., email, web).
- UDP (Unreliable Protocol):
- Connectionless and faster.
- No acknowledgment or retransmission.
- Suitable for low-latency applications (e.g., online gaming, streaming).
Use Case: UDP in Gaming
- Player data (e.g., position, appearance) is sent rapidly to a central server.
- Missed packets are acceptable due to high frequency.
- Server-side prediction may be used to compensate for dropped packets.
Further material #
- Intro to CUDA - An introduction, how-to, to NVIDIA’s GPU parallel programming architecture - YouTube
- Vint Cerf - INTERNET HALL of FAME PIONEER - YouTube
Week 11, 12 #
最終課題の期間。課題はプログラムの実装とレポートの提出。
- Rust 言語を使用して、キャッシュメモリをシミュレートするプログラムを実装する。
- 実装内容を詳述したレポートを最大 2,000 ワードで記述して提出する。
Write a cache simulator with source code which takes a memory trace file as input, simulates the hit/miss behaviour of a cache memory on this trace, and outputs the total number of hits, misses, and evictions.
まず、課題で何を実装するよう求められているかの理解が少々難解。その理解のためには以下の動画が参考になる。
- Ep 073: Introduction to Cache Memory - YouTube
- Ep 074: Fully Associative Caches and Replacement Algorithms - YouTube
- Ep 075: Direct Mapped Caches - YouTube
Ep 073: Introduction to Cache Memory - YouTube #
Ep 074: Fully Associative Caches and Replacement Algorithms - YouTube #
Ep 075: Direct Mapped Caches - YouTube #